برای تغییر متغییر ها در کد استفاده میشود
Creating modules is a great way to reuse code, but often you need the same module with smaller variations throughout your design. This is what generics and the generic map is for. It allows you to make certain parts of the module configurable at compile-time.
Constants are used when we want to avoid typing the same value over and over again. They can be used for defining bit-widths of signal vectors at compile-time, and they can even be mapped to generic constants as well. Constants can be used in place of signals and variables anywhere in the code, but their values cannot be changed after compile-time.
This blog post is part of the Basic VHDL Tutorials series.
In the previous tutorial, we created a 4-input multiplexer module with a bus width of 8 bits. But what if we also need a similar MUX with a different bus width? Is the only solution to copy-paste the code into a new module, and change the numbers?
Fortunately, no.
It is possible to create constants in VHDL using this syntax:
constant <constant_name> : <type> := <value>;
Constants can be declared along with signals in the declarative part of a VHDL file, or it can be declared along with variables in a process.
Constants can be passed into a module through the entity by using the generic keyword. The syntax for creating an entity for a module which accepts generic constants is:
entity <entity_name> is
generic(
<entity_constant_name> : <type>;
.
);
port(
<entity_signal_name> : in|out|inout <type>;
.
);
end entity;
The syntax for instantiating a generic module in another VHDL file is:
<label> : entity <library_name>.<entity_name>(<architecture_name>)
generic map(
<entity_constant_name> => <value_or_constant>,
.
)
port map(
<entity_signal_name> => <local_signal_name>,
.
);
The final code for the generic MUX testbench:
library ieee;
use ieee.std_logic_1164.all;
use ieee.numeric_std.all;
entity T16_GenericMapTb is
end entity;
architecture sim of T16_GenericMapTb is
constant DataWidth : integer := 8;
signal Sig1 : signed(DataWidth-1 downto 0) := x"AA";
signal Sig2 : signed(DataWidth-1 downto 0) := x"BB";
signal Sig3 : signed(DataWidth-1 downto 0) := x"CC";
signal Sig4 : signed(DataWidth-1 downto 0) := x"DD";
signal Sel : signed(1 downto 0) := (others => '0');
signal Output : signed(DataWidth-1 downto 0);
begin
-- An Instance of T16_GenericMux with architecture rtl
i_Mux1 : entity work.T16_GenericMux(rtl)
generic map(DataWidth => DataWidth)
port map(
Sel => Sel,
Sig1 => Sig1,
Sig2 => Sig2,
Sig3 => Sig3,
Sig4 => Sig4,
Output => Output);
-- Testbench process
process is
begin
wait for 10 ns;
Sel <= Sel + 1;
wait for 10 ns;
Sel <= Sel + 1;
wait for 10 ns;
Sel <= Sel + 1;
wait for 10 ns;
Sel <= Sel + 1;
wait for 10 ns;
Sel <= "UU";
wait;
end process;
end architecture;
The final code for the generic MUX module:
library ieee;
use ieee.std_logic_1164.all;
use ieee.numeric_std.all;
entity T16_GenericMux is
generic(DataWidth : integer);
port(
-- Inputs
Sig1 : in signed(DataWidth-1 downto 0);
Sig2 : in signed(DataWidth-1 downto 0);
Sig3 : in signed(DataWidth-1 downto 0);
Sig4 : in signed(DataWidth-1 downto 0);
Sel : in signed(1 downto 0);
-- Outputs
Output : out signed(DataWidth-1 downto 0));
end entity;
architecture rtl of T16_GenericMux is
begin
process(Sel, Sig1, Sig2, Sig3, Sig4) is
begin
case Sel is
when "00" =>
Output <= Sig1;
when "01" =>
Output <= Sig2;
when "10" =>
Output <= Sig3;
when "11" =>
Output <= Sig4;
when others => -- 'U', 'X', '-', etc.
Output <= (others => 'X');
end case;
end process;
end architecture;
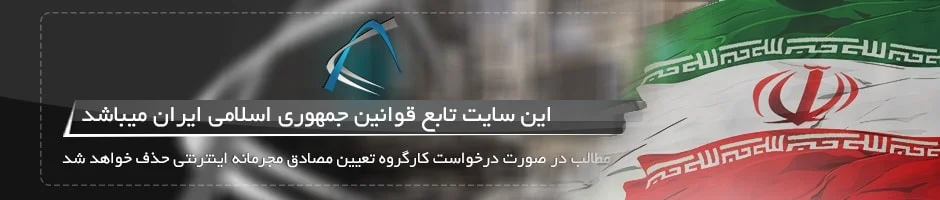
We created a MUX module with a configurable bus width. Now, the bus width is specified in only one place, in the testbench file. We can easily change it to create a MUX with a different bus width.
If we compare the waveform to the one from the previous tutorial, we can see that the behavior is identical. This is because we haven’t changed the behavior of the code at all.
Constants can be used to avoid hard-coding values in multiple places
Generics can be used to make modules more adaptable
We created a MUX module with a configurable bus width. Now, the bus width is specified in only one place, in the testbench file. We can easily change it to create a MUX with a different bus width.
If we compare the waveform to the one from the previous tutorial, we can see that the behavior is identical. This is because we haven’t changed the behavior of the code at all.
Constants can be used to avoid hard-coding values in multiple places
Generics can be used to make modules more adaptable
برای کپسوله کردن کد ها و ساخت ماژول برای ساده سازی در طراحی ها استفاده میشود
A module is a self-contained unit of VHDL code. Modules communicate with the outside world through the entity. Port map is the part of the module instantiation where you declare which local signals the module’s inputs and outputs shall be connected to.
In previous tutorials in this series we have been writing all our code in the main VHDL file, but normally we wouldn’t do that. We create logic with the purpose of using it in an FPGA or ASIC design, not for the simulator.
A VHDL module created for running in a simulator usually has no input or output signals. It is entirely self-contained. That’s why the entity of our designs have been empty. There has been nothing between the entity tag and the end entity; tag.
This blog post is part of the Basic VHDL Tutorials series.
A module without any input or output signals cannot be used in a real design. Its only purpose is to allow us to run VHDL code in a simulator. Therefore it is referred to as a testbench. To simulate a module with input and output signals we have to instantiate it in a testbench.
Modules and testbenches often come in pairs, and they are stored in different files. A common naming scheme is to call the testbench the module name with Tb” appended, and to name the architecture sim”. If the module is called MyModule” the testbench will be called MyModuleTb”. Consequently, the filenames become MyModuleTb.vhd” and MyModule.vhd”.

With the help of the testbench code we can verify that the module is working correctly in a simulation environment. The module being tested is commonly referred to a the device under test (DUT).
Modules can also be instantiated within other modules. Partitioning the code into modules allows it to be instantiated multiple times. You can create several instances of a module within the same design, and it can be reused across many designs.
The syntax for an entity with a port in VHDL is:
entity <entity_name> is
port(
<entity_signal_name> : in|out|inout <signal_type>;
.
);
end entity;
The syntax for instantiating such a module in another VHDL file is:
<label> : entity <library_name>.<entity_name>(<architecture_name>) port map(
<entity_signal_name> => <local_signal_name>,
.
);
The <label> can be any name, and it will show up in the hierarchy window in ModelSim. The <library_name> for a module is set in the simulator, not in the VHDL code. By default every module is compiled into the work library. The <entity_name> and <architecture_name> must match the module we are creating an instance of. Finally, each of the entity signals must be mapped to a local signal name.
There are other ways to instantiate a module in VHDL, but this is the basic syntax for explicit instantiation.
The final code for the MUX testbench:
library ieee;
use ieee.std_logic_1164.all;
use ieee.numeric_std.all;
entity T15_PortMapTb is
end entity;
architecture sim of T15_PortMapTb is
signal Sig1 : unsigned(7 downto 0) := x"AA";
signal Sig2 : unsigned(7 downto 0) := x"BB";
signal Sig3 : unsigned(7 downto 0) := x"CC";
signal Sig4 : unsigned(7 downto 0) := x"DD";
signal Sel : unsigned(1 downto 0) := (others => '0');
signal Output : unsigned(7 downto 0);
begin
-- An instance of T15_Mux with architecture rtl
i_Mux1 : entity work.T15_Mux(rtl) port map(
Sel => Sel,
Sig1 => Sig1,
Sig2 => Sig2,
Sig3 => Sig3,
Sig4 => Sig4,
Output => Output);
-- Testbench process
process is
begin
wait for 10 ns;
Sel <= Sel + 1;
wait for 10 ns;
Sel <= Sel + 1;
wait for 10 ns;
Sel <= Sel + 1;
wait for 10 ns;
Sel <= Sel + 1;
wait for 10 ns;
Sel <= "UU";
wait;
end process;
end architecture;
The final code for the MUX module:
library ieee;
use ieee.std_logic_1164.all;
use ieee.numeric_std.all;
entity T15_Mux is
port(
-- Inputs
Sig1 : in unsigned(7 downto 0);
Sig2 : in unsigned(7 downto 0);
Sig3 : in unsigned(7 downto 0);
Sig4 : in unsigned(7 downto 0);
Sel : in unsigned(1 downto 0);
-- Outputs
Output : out unsigned(7 downto 0));
end entity;
architecture rtl of T15_Mux is
begin
process(Sel, Sig1, Sig2, Sig3, Sig4) is
begin
case Sel is
when "00" =>
Output <= Sig1;
when "01" =>
Output <= Sig2;
when "10" =>
Output <= Sig3;
when "11" =>
Output <= Sig4;
when others => -- 'U', 'X', '-', etc.
Output <= (others => 'X');
end case;
end process;
end architecture;
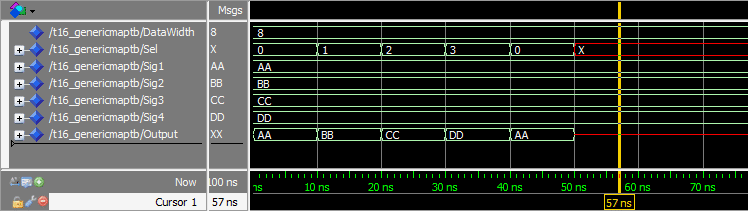
As we can see from the waveform, the multiplexer (MUX) module works as expected. The waveform is identical to the one from the previous tutorial which we created without using modules.
Now there is a clear separation between the design module and the testbench. The module containing the MUX is what we intend to use in a design, and the testbench’s only purpose is to allow us to run it in a simulator. There is a process in the testbench that uses wait statements for creating artificial time delays in the simulation. The design module has no notion of time, it only reacts to external stimuli.
We named the architecture of the testbench sim, for simulation. The architecture of the design module was named rtl, which stands for register-transfer level. These are just naming conventions. When you see a file with such a name, you immediately know whether it’s a testbench or a design module. Different companies may have different naming conventions.
Input and output signals are specified in the entity of a module
A module with no in/out signals is called a testbench, and it can only be used in a simulator
A module with in/out signals can usually not be run directly in a simulator
library ieee;
use ieee.std_logic_1164.all;
use ieee.numeric_std.all;
entity T15_Mux is
port(
-- Inputs
Sig1 : in unsigned(7 downto 0);
Sig2 : in unsigned(7 downto 0);
Sig3 : in unsigned(7 downto 0);
Sig4 : in اصول کار multiplexer ها توضیح داده شود
The Case-When statement will cause the program to take one out of multiple different paths, depending on the value of a signal, variable, or expression. It’s a more elegant alternative to an If-Then-Elsif-Else statement with multiple Elsif’s.
Other programming languages have similar constructs, using keywords such as a switch, case, or select. Among other things, Case-When statements are commonly used for implementing multiplexers in VHDL. Continue reading, or watch the video to find out how!
This blog post is part of the Basic VHDL Tutorials series.
The basic syntax for the Case-When statement is:
case <expression> is
when <choice> =>
code for this branch
when <choice> =>
code for this branch
.
end case;
The <expression> is usually a variable or a signal. The Case statement may contain multiple when choices, but only one choice will be selected.
The <choice> may be a unique value like "11":
when "11" =>
Or it can be a range like 5 to 10:
when 5 to 10 =>
It can contain several values like 1|3|5:
when 1|3|5 =>
And most importantly, the others choice. It is selected whenever no other choice was matched:
when others =>
The others choice is equivalent to the Else branch in the If-Then-Elsif-Else statement.
library ieee;
use ieee.std_logic_1164.all;
use ieee.numeric_std.all;
entity T14_CaseWhenTb is
end entity;
architecture sim of T14_CaseWhenTb is
signal Sig1 : unsigned(7 downto 0) := x"AA";
signal Sig2 : unsigned(7 downto 0) := x"BB";
signal Sig3 : unsigned(7 downto 0) := x"CC";
signal Sig4 : unsigned(7 downto 0) := x"DD";
signal Sel : unsigned(1 downto 0) := (others => '0');
signal Output1 : unsigned(7 downto 0);
signal Output2 : unsigned(7 downto 0);
begin
-- Stimuli for the selector signal
process is
begin
wait for 10 ns;
Sel <= Sel + 1;
wait for 10 ns;
Sel <= Sel + 1;
wait for 10 ns;
Sel <= Sel + 1;
wait for 10 ns;
Sel <= Sel + 1;
wait for 10 ns;
Sel <= "UU";
wait;
end process;
-- MUX using if-then-else
process(Sel, Sig1, Sig2, Sig3, Sig4) is
begin
if Sel = "00" then
Output1 <= Sig1;
elsif Sel = "01" then
Output1 <= Sig2;
elsif Sel = "10" then
Output1 <= Sig3;
elsif Sel = "11" then
Output1 <= Sig4;
else -- 'U', 'X', '-' etc.
Output1 <= (others => 'X');
end if;
end process;
-- Equivalent MUX using a case statement
process(Sel, Sig1, Sig2, Sig3, Sig4) is
begin
case Sel is
when "00" =>
Output2 <= Sig1;
when "01" =>
Output2 <= Sig2;
when "10" =>
Output2 <= Sig3;
when "11" =>
Output2 <= Sig4;
when others => -- 'U', 'X', '-', etc.
Output2 <= (others => 'X');
end case;
end process;
end architecture;
First, we created a process using If-Then-Elsif-Else that would forward one of the signals Sig1, Sig2, Sig3, or Sig4, based on the value of the selector signal Sel.
Then we created a process that did exactly the same, using the Case-When statement. We can see from the waveform that the output signals from the two processes, Output1 and Output2, behave exactly the same.
In our example, the Sel signal has only four legal values. But if there had been a higher number of possibilities, we can easily see that the Case-When statement can help making code more readable. This is the preferred way of creating such a component by most VHDL designers.
Understanding of the multiplexer was the bonus point of this exercise. Multiplexers, or MUX’s for short, are central components in digital design. It is simply a switch that selects one of several inputs, and forwards it to the output.
This is an illustration of how our MUX forwards the selected input signal:
mux
We used the others clause to catch all values of Sel which were not ones or zeros. As we learned in the std_logic tutorial, these signals can have a number of values which are not '0' or '1'. It’s good design practice to deal with these values by outputting 'X'. This indicates an unknown value on this signal, and it will be visible in downstream logic as well.
We can see from the waveform that when the Sel signal turned red, Output1 and Output2 also changed to "XX". This is when others => in action.
Additionally, the console output in ModelSim shows a warning because of the Sel signal being set to "UU". The ** Warning: NUMERIC_STD.”=”: metavalue detected, returning FALSE” messages appear at 50 ns simulation time, which is exactly when the signals turn red.
Case-When can be used instead of multiple If-Then-Elsif statements
The when others => can be used to implement a default choice
Multiplexers are preferably created using Case-When statements
A concurrent statement in VHDL is a signal assignment within the architecture, but outside of a normal process construct. The concurrent statement is also referred to as a concurrent assignment or concurrent process.
When you create a concurrent statement, you are actually creating a process with certain, clearly defined characteristics. Concurrent statements are always equivalent to a process using a sensitivity list, where all the signals to the right of the signal assignment operator are on the sensitivity list.
These shorthand notation processes are useful when you want to create simple logic which results in the assignment of a single signal. Instead of typing out a full process construct with sensitivity lists and all of that, you can simply assign to the target signal directly in the architecture.
When used correctly, the intention of the code will still be pretty clear. No need to create a process for every single bit you want to flip.
library ieee;
use ieee.std_logic_1164.all;
use ieee.numeric_std.all;
entity T13_ConcurrentProcsTb is
end entity;
architecture sim of T13_ConcurrentProcsTb is
signal Uns : unsigned(5 downto 0) := (others => '0');
signal Mul1 : unsigned(7 downto 0);
signal Mul2 : unsigned(7 downto 0);
signal Mul3 : unsigned(7 downto 0);
begin
process is
begin
Uns <= Uns + 1;
wait for 10 ns;
end process;
-- Process multiplying Uns by 4
process is
begin
Mul1 <= Uns & "00";
wait on Uns;
end process;
-- Equivalent process using sensitivity list
process(Uns) is
begin
Mul2 <= Uns & "00";
end process;
-- Equivalent process using a concurrent statement
Mul3 <= Uns & "00";
end architecture;
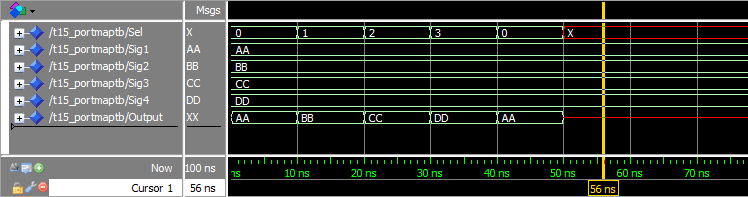
We can see from the waveform that Mul1, Mul2, and Mul3 behave exactly the same. This is because the concurrent statement and the two processes we created are equivalent.
A concurrent statement works just like a process. All signals to the right of the <= are automatically added to the sensitivity list. This means that the signal to the left of the <= will be updated whenever one of the signals that are evaluated change.
There are many ways to multiply numbers in VHDL. In this exercise we multiplied the Uns signal by 4, using bit shifting. All our signals are of unsigned type, meaning that they are interpreted by numbers. Appending a 0 to the right of a binary number is the same as multiplying it by 2.
This is an illustration of what happens at the cursor in the waveform:

با & کردن 00 عمل ضرب در 4 انجام میشود.
library ieee;
use ieee.std_logic_1164.all;
use ieee.numeric_std.all;
entity T13_ConcurrentProcsTb is
end entity;
architecture sim of T13_ConcurrentProcsTb is
signal Uns : unsigned(5 downto 0) := (others => '0');
signal Mul1 : unsigned(7 downto 0);
signal Mul2 : unsignedمشخصات
The signed and unsigned types in VHDL are bit vectors, just like the std_logic_vector type. The difference is that while the std_logic_vector is great for implementing data buses, it’s useless for performing arithmetic operations.
If you try to add any number to a std_logic_vector type, ModelSim will produce the compilation error: No feasible entries for infix operator +”. This is because the compiler doesn’t know how to interpret this collection of bits that the vector is.
This blog post is part of the Basic VHDL Tutorials series.
We must declare our vector as signed or unsigned for the compiler to treat it as a number.
The the syntax for declaring signed and unsigned signals is:
signal <name> : signed(<N-bits> downto 0) := <initial_value>;
signal <name> : unsigned(<N-bits> downto 0) := <initial_value>;
Just like with std_logic_vector, the ranges can be to or downto any range. But declaring signals with other ranges than downto 0 is so uncommon, that spending any more time on the subject would only serve to confuse us. The initial value is optional, by default it’s 'U' for all bits.
We have already been using the integer type for arithmetic operations in previous tutorials. So why do we need the signed and unsigned types? For most, digital designers like to have more control of how many bits a signal actually uses.
Also, signed and unsigned values wrap around, while the simulator will throw a run-time error if an integer is incremented beyond bounds. Finally, signed and unsigned can have other values like 'U' and 'X', while integers can only have number values. These meta-values can help us discovering errors in our design.
library ieee;
use ieee.std_logic_1164.all;
use ieee.numeric_std.all;
entity T12_SignedUnsignedTb is
end entity;
architecture sim of T12_SignedUnsignedTb is
signal UnsCnt : unsigned(7 downto 0) := (others => '0');
signal SigCnt : signed(7 downto 0) := (others => '0');
signal Uns4 : unsigned(3 downto 0) := "1000";
signal Sig4 : signed(3 downto 0) := "1000";
signal Uns8 : unsigned(7 downto 0) := (others => '0');
signal Sig8 : signed(7 downto 0) := (others => '0');
begin
process is
begin
wait for 10 ns;
-- Wrapping counter
UnsCnt <= UnsCnt + 1;
SigCnt <= SigCnt + 1;
-- Adding signals
Uns8 <= Uns8 + Uns4;
Sig8 <= Sig8 + Sig4;
end process;
end architecture;
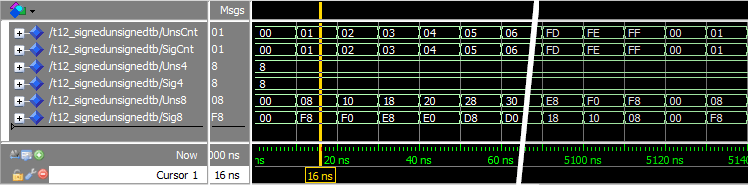
The radix of all signals in the waveform are set to hexadecimal so that we can compare them equally.
In the wrapping counter example, we see that the signed and unsigned signals behave exactly the same way. Both UnsCnt and SigCnt start at 0, and are incremented one-by-one up to FF. Hex FF (decimal 255) is the largest value our 8-bit signals can hold. Therefore, the next increment wraps both of them back to 0.
We created the two 4-bit signals Uns4 and Sig4, and gave them both an initial value of 1000”. We can see from the waveform that they are both just hex 8 (binary 1000).
The last two 8-bit signals we created were Uns8 and Sig8. We can see from the waveform that their initial values are 0, as one would expect. But from there, they behave differently! Apparently, signed and unsigned types made a difference when adding two signals of different lengths.
This is because of something known as sign extension. Adding positive or negative numbers stored in vectors of equal length, is the same operation in digital logic. This is because of how two’s complement works. If the vectors are of different lengths, the shortest vector will have to be extended.
The unsigned 4-bit binary number 1000” is decimal 8, while the signed 4-bit number 1000” is decimal -8. The 1” at the left-most place of the signed number indicates that this is a negative number. Therefore, the two 4-bit signals are sign extended differently by the compiler.
This is a visualization of how sign extension creates the differing values for the Uns8 and Sig8 signals:

The std_logic_vector type can be used for creating signal buses in VHDL. The std_logic is the most commonly used type in VHDL, and the std_logic_vector is the array version of it.
While the std_logic is great for modeling the value that can be carried by a single wire, it’s not very practical for implementing collections of wires going to or from components. The std_logic_vector is a composite type, which means that it’s a collection of subelements. Signals or variables of the std_logic_vector type can contain an arbitrary number of std_logic elements.
This blog post is part of the Basic VHDL Tutorials series.
The syntax for declaring std_logic_vector signals is:
signal <name> : std_logic_vector(<lsb> to <msb>) := <initial_value>;
or
signal <name> : std_logic_vector(<msb> downto <lsb>) := <initial_value>;
where <name> is an arbitrary name for the signal and <initial_value> is an optional initial value. The <lsb> is the index of the least significant bit, and <msb> is the index of the most significant bit.
The to or downto specifies the direction of the range of the bus, basically its endianess. Although both work equally well, it’s most common for VHDL designer to declare vectors using downto. Therefore, I recommend that you always use downto when you declaring bit vectors to avoid confusion.
The VHDL code for declaring a vector signal that can hold a byte:
signal MySlv : std_logic_vector(7 downto 0);
The VHDL code for declaring a vector signal that can hold one bit:
signal MySlv : std_logic_vector(0 downto 0);
The VHDL code for declaring a vector signal that can hold zero bits (an empty range):
signal MySlv : std_logic_vector(-1 downto 0);
library ieee;
use ieee.std_logic_1164.all;
entity T11_StdLogicVectorTb is
end entity;
architecture sim of T11_StdLogicVectorTb is
signal Slv1 : std_logic_vector(7 downto 0);
signal Slv2 : std_logic_vector(7 downto 0) := (others => '0');
signal Slv3 : std_logic_vector(7 downto 0) := (others => '1');
signal Slv4 : std_logic_vector(7 downto 0) := x"AA";
signal Slv5 : std_logic_vector(0 to 7) := "10101010";
signal Slv6 : std_logic_vector(7 downto 0) := "00000001";
begin
-- Shift register
process is
begin
wait for 10 ns;
for i in Slv6'left downto Slv6'right + 1 loop
Slv6(i) <= Slv6(i-1);
end loop;
Slv6(Slv6'right) <= Slv6(Slv6'left);
end process;
end architecture;
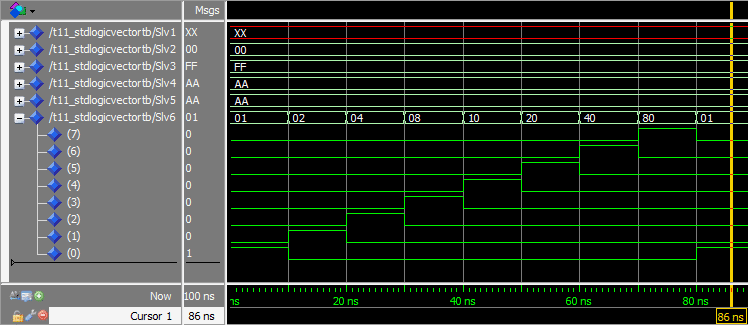
In this exercise we declared six std_logic_vector buses, each eight bits long (one byte).
Signal Slv1 was declared without a initial value. The bus is seen having the value XX in the waveform screenshot. This is because the value that is displayed on the bus is in hexadecimals, and XX indicates a non-hex value. But when we expanded the bus in the waveform, we could see that the individual bits were indeed U’s.
Signal Slv2 was declared using an initial value of all 0’s. Instead of specifying the exact value for each bit, we used (other => '0') in place of the initial value. This is known as an aggregate assignment. The important part is that it will set all bits in the vector to whatever you specify, no matter how long it is.
Signal Slv3 was declared using an aggregate assignment to give all bits the initial value of 1. We can see FF displayed on this signal in the waveform, which is hex for eight 1’s.
Signal Slv4 was declared with an initial value specified in hex, AA. Each hex digit is 4 bits long, therefore we must supply two digits (AA) for our vector which is 8 bits long.
Signal Slv5 declares exactly the same initial value as Slv4, but now we specified it as the binary value 10101010. We can see from the waveform that both signals have the hex value AA.
Signal Slv6 was declared with an initial value of all zeros, except for the rightmost bit which was '1'. We used a process to create a shift register from this signal. The shift register, as the name implies, shifts the contents of the vector one place to the left every 10 nanoseconds.
Our process wakes up every 10 ns, and the For-Loop shifts all bits in the vector one place to the left. The final bit is shifted back into the first index by the Slv6(Slv6'right) <= Slv6(Slv6'left); statement. In the waveform we can see the '1' ripple through the vector.
This is a visualization of how the '1' propagates through our shift register:

By using the 'left' and 'right attributes, we made our code more generic. If we change the width of Sig6, the process will still work. It’s good design practice to use attributes where you can instead of hardcoding values.
You may be wondering if there are more attributes that you can use, and there are. I won’t be talking more about them in this tutorial series, because I consider them to be advanced VHDL features.
N-bit vectors should be declared using std_logic_vector(N-1 downto 0)
A vector can be assigned as a whole or bits within it can be accessed individually
All bits in a vector can be zeroed by using the aggregate assignment (others => '0')
Code can be made more generic by using attributes like 'left and 'right
از attribute برای تغییر پارامتر ها در کد استفاده میشود.
ارزش بیت ها در کد متفاوت است MSB و LSB
چطوری از STD_logic استفاده کنیم.
The most common type used in VHDL is the std_logic. Think of this type as a single bit, the digital information carried by a single physical wire. The std_logic gives us a more fine-grained control over the resources in our design than the integer type, which we have been using in the previous tutorials.
Normally, we want a wire in a digital interface to have either the value '1' or '0'. These two values are the only values that a bit, a binary digit, can have. But in reality, a physical digital signal can be in a number of states, which the std_logic type does a good job emulating. Therefore it is the most frequently used type in VHDL.
The std_logic type can have the following values:
This may seem like a lot of different states for a type that is supposed to model a single binary value. Don’t worry, we won’t be using all these types in this tutorial series. We will be using '1' and '0' of course. And we will also be seeing 'U' and 'X', which will help us spot errors in our design. The other values are advanced VHDL features which can be used for things like modeling communication with for example I2C devices, or for creating tri-state buses.
If several processes are trying to write different values to a signal, we say that it has multiple drivers. If a std_logic signal has multiple drivers, it won’t be a compilation or run-time error, at least not in the simulator. That is because std_logic is a resolved type, meaning that its value will be determined by a resolution function.
The value of a std_logic signal with two drivers will be determined based on this resolution table:
| ‘1’ | Logic 1 |
| ‘0’ | Logic 0 |
| ‘Z’ | High impedance |
| ‘W’ | Weak signal, can’t tell if 0 or 1 |
| ‘L’ | Weak 0, pulldown |
| ‘H’ | Weak 1, pullup |
| ‘-‘ | Don’t care |
| ‘U’ | Uninitialized |
| ‘X’ | Unknown, multiple drivers |
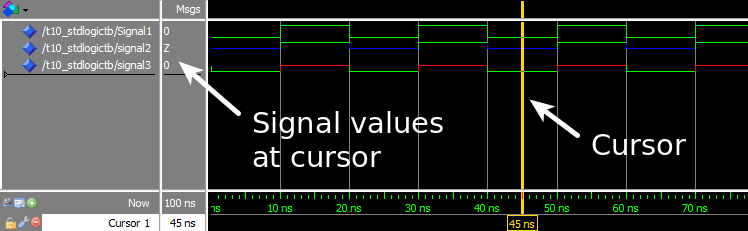
The waveform window in ModelSim after we pressed run, and zoomed in on the timeline:
The waveform with the cursor placed on the other part of the repeating signal cycleThe waveform with the cursor placed on the other part of the repeating signal cycle:
The exercise demonstrated how the resolution function of VHDL works with the std_logic type. When working with digital logic it’s often more practical to study the timeline in a waveform rather than using printouts. Therefore we used the ModelSim waveform to check the signal values in this exercise.
The first process and Signal1 is only used for changing the value that the third process is driving on Signal2 and Signal3.
The second process, Driver A, will try to drive a 'Z' onto Signal2, and a '0' onto Signal3 constantly.
The third process, Driver B, will alternate between driving '1' and 'Z' onto both Signal2 and Signal3.
We see in the waveform screenshots that Signal1 is changing between '0' and '1', because there is only one process trying to drive this signal. We can also see that the multiple driver signals are resolved according to the resolution table posted in the VHDL code comments:
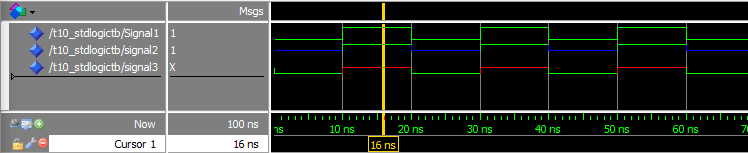
| Signal | Driver A | Driver B | Result |
|---|---|---|---|
| Signal2 | ‘Z’ | ‘Z’ | ‘Z’ |
| Signal2 | ‘Z’ | ‘1’ | ‘1’ |
| Signal3 | ‘0’ | ‘Z’ | ‘0’ |
| Signal3 | ‘0’ | ‘1’ | ‘X’ |
std_logic is the most common type used to hold a single bit value in VHDLstd_logic signal as a physical wire in our digital designstd_logic signal, its value is determined by a resolution tablelibrary ieee;
use ieee.std_logic_1164.all;
entity T10_StdLogicTb is
end entity;
architecture sim of T10_StdLogicTb is
signal Signal1 : std_logic := '0';
signal Signal2 : std_logic;
signal Signal3 : std_logic;
begin
process is
begin
wait for 10 ns;
Signal1 <= not Signal1;
end process;
-- Driver A
process is
begin
Signal2 <= 'Z';
Signal3 <= '0';
wait;
end process;
-- Driver B
process(Signal1) is
begin
if Signal1 = '0' then
Signal2 <= 'Z';
Signal3 <= 'Z';
else
Signal2 <= '1';
Signal3 <= '1';
end if;
end process;
end architecture;
| U | X | 0 | 1 | Z | W | L | H | – | |
|---|---|---|---|---|---|---|---|---|---|
| U | X | X | 1 | 1 | 1 | 1 | 1 | X | 1 |
| U | X | 0 | X | 0 | 0 | 0 | 0 | X | 0 |
| U | U | U | U | U | U | U | U | U | U |
| U | X | X | X | X | X | X | X | X | X |
| U | X | 0 | 1 | Z | W | L | H | X | Z |
| U | X | 0 | 1 | W | W | W | W | X | W |
| U | X | 0 | 1 | L | W | L | W | X | L |
| U | X | 0 | 1 | H | W | W | H | X | H |
| U | X | X | X | X | X | X | X | X | – |
درباره این سایت